
La empresa estadounidense Boston Dynamics ha explicado en su blog cómo funcionan los sistemas de visión y coordinación del robot Atlas, los cuales le permiten correr, saltar, esquivar obstáculos y hasta practicar 'parkour'.
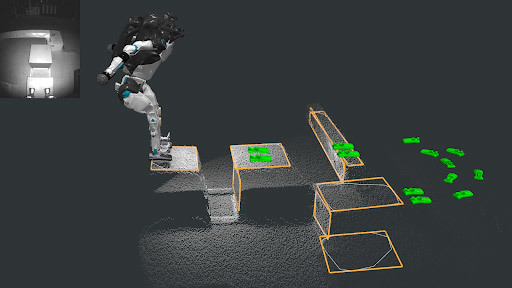
En primer lugar, estos androides están equipados con cámaras de profundidad que generan nubes de puntos visuales en tiempo real a una frecuencia de 15 cuadros por segundo. Para ello se sirven de un algoritmo de segmentación de plano múltiple que es convertido en un mapa tridimensional con las superficies a su alrededor y sus respectivas distancias.
Con ayuda de esta información, Atlas planifica su propio comportamiento paso a paso en función de aquellos objetos que podrían interferir con los movimientos que necesita realizar para cumplir con la trayectoria y acrobacias que le indican los ingenieros.
Las instrucciones que recibe el robot incluyen descripciones aproximadas de los objetos que encontrará en su camino y las acciones que deberá realizar con estos. Así, su tarea puede requerir que se suba de un salto a una caja situada en determinado lugar y el androide deberá encontrar su objetivo por su propia cuenta.
Incluso podrá hacerlo si la caja en cuestión es desplazada levemente de su lugar a una distancia inferior a un metro. Sin embargo, si es movida demasiado lejos, no podrá identificarla como el objeto que busca y se detendrá.
Para realizar todas estas acciones, el robot posee una 'biblioteca' de patrones de movimiento que pueden ser optimizados en tiempo real al realizar una trayectoria. Y ante cada situación concreta, elige aquel elemento de esta colección que mejor se adapta a su objetivo.
La red neuronal de Atlas se encarga de ejecutar cada movimiento concreto regulando su fuerza y duración para lograr la mayor eficiencia y controlando el centro de su masa corporal. De esta manera, los ingenieros no necesitan enseñarle a saltar desde una altura de 50 y de 70 centímetros por separado, ya que el androide será capaz de utilizar para ello el mismo patrón ajustando la distancia hasta el piso.
Asimismo, el sistema adapta suavemente los movimientos en curso para prepararse para el patrón que deberá ejecutar a continuación, por ejemplo, disminuyendo la velocidad al correr para luego poder dar un salto mortal hacia atrás.
Los ingenieros explican que gracias a estas habilidades Atlas podrá continuar adquiriendo cada vez más nuevas destrezas para reconocer e interactuar con su entorno.
Si te ha parecido interesante, ¡compártelo con tus amigos!
